






智能化出入口控制系统定制开发商
 18029231761
18029231761
 18029231761
18029231761

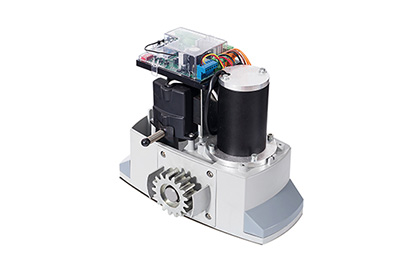
走地电机作为驱动地面移动设备的核心动力装置,在工业自动化、智能设备和服务机器人领域具有不可替代的地位。与平移电机相比,走地电机专为地面移动场景设计,通过电动机与减速器的组合驱动轮式机构,实现设备在各种地形环境下的稳定移动。其技术特性与应用优势正推动多个行业实现效率革新。
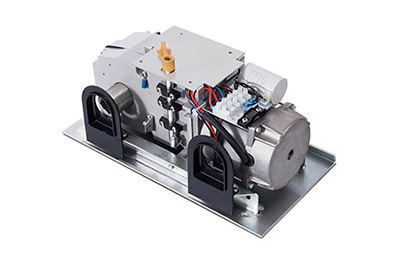
走地电机采用高度集成的机电一体化设计,将电动机、减速器和驱动轮组合为紧凑单元。这种结构不仅减小了设备的整体体积和重量,还通过优化传动路径减少能量损失。电机外壳采用强化工程材料,具备优异的防尘、防震和耐冲击性能,可适应工厂车间、户外环境等多种复杂工况,在持续高强度运行条件下保持稳定输出。
通过先进的控制算法与驱动技术,走地电机实现从低速高扭矩到高速平稳运行的宽范围调速能力。在AGV小车等应用中,电机响应时间可控制在毫秒级,支持设备实现厘米级精确定位和灵活避障。针对不同地面材质(如地毯、瓷砖、水泥地),电机可自动调整输出功率与转速,在保证牵引力的同时避免打滑现象。
现代走地电机普遍采用无刷直流或永磁同步技术,能量转换效率可达85%以上,显著高于传统传动系统。小型轻量化设计大幅降低设备整体能耗,在同等电池容量下延长移动设备工作时间30%以上。智能休眠与功率自适应功能进一步优化能源利用,使设备在待机或低负载状态下自动进入节能模式。
通过特殊设计的驱动轮结构与扭矩分配算法,走地电机可应对坡度≤15°的斜坡、5mm以下地面缝隙以及潮湿、油污等特殊环境。在仓储物流场景中,配备差速控制系统的双走地电机组合,能实现零半径转向与精准轨迹跟踪,极大提升在狭窄通道内的操控灵活性。
在智能扫地机器人领域,走地电机通过动态功率调整技术,可自动识别地毯区域并瞬时提升扭矩输出20%-40%,确保清洁效果;而在硬质地面上自动切换为高效模式,提升移动速度30%以上,显著缩短清洁时间。
现代走地电机普遍配备标准通信接口(如CAN总线、RS485),可无缝接入设备控制系统。通过内置传感器实时反馈转速、温度、负载状态等参数,结合云端数据分析实现预测性维护。在智能工厂场景中,多台装备走地电机的AGV通过5G网络实现集群协作,自动优化物流路径,提升整体作业效率。
走地电机采用标准化安装接口与参数配置,支持快速更换与跨平台应用。功率范围覆盖50W至5kW,满足从小型服务机器人到重型物流设备的动力需求。开放式控制协议支持与主流PLC、ROS等系统对接,大幅缩短设备开发周期,降低集成难度。
扫地机器人通过双走地电机系统实现精准路径规划与越障,配合吸尘电机完成全屋清洁。动态功率调整技术使其在不同地面材质上自动优化牵引力与能耗。
AGV智能小车搭载高扭矩走地电机,负载能力达1.5吨,支持8小时连续运行。通过激光SLAM导航实现厘米级定位精度,在汽车制造、电商仓储场景中承担物料转运任务。
防爆型走地电机驱动危险环境巡检机器人,在石油化工、地下管廊等场景执行监测任务。强化密封结构与无火花设计满足ATEX防爆认证要求,适应复杂工况。
走地电机凭借其紧凑可靠的结构设计、宽范围精准调速能力、高效节能特性以及强大的环境适应性,已成为地面移动设备的核心驱动力。随着永磁材料与智能控制技术的持续突破,新一代走地电机正向更高功率密度、更低能耗、更强环境感知能力方向发展。在工业4.0与智能服务设备快速普及的背景下,其技术优势将进一步推动自动化物流、智能清洁、特种作业等领域的革新进程,为现代产业创造显著效益。